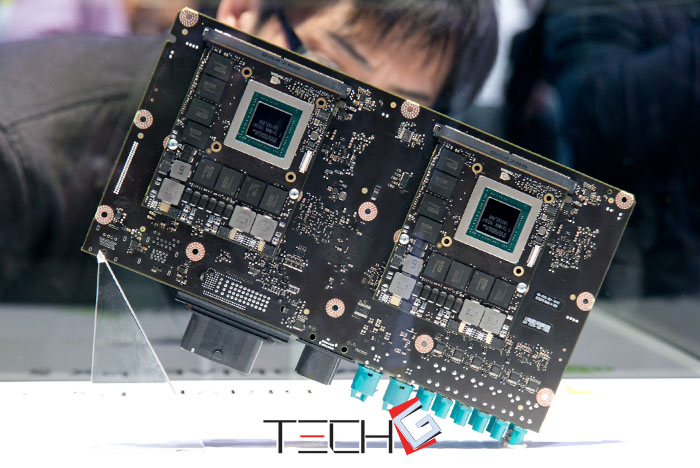
↑엔비디아 드라이브 PX2
초당 24조의 연산을 하는 컴퓨터. 숫자만 보면 쉽게 와 닿지 않는다. 맥북 프로 150대에 맞먹는 성능이라는 말도 솔직히 곧바로 이해된다고 말하긴 어렵다. 무엇보다 일상에서 이런 성능을 내는 컴퓨터를 써야 할지 의문이 드는 것이 사실이다. 아마도 대부분은 당장 이 컴퓨터를 만날 일은 없을 것이다. 적어도 자율 주행 자동차를 타기 이전까지는 말이다.
초당 24조의 연산을 하는 컴퓨터가 드라이브 PX2(Drive PX2)다. 엔비디아가 자율 주행 자동차를 위해 CES에서 공개한 슈퍼 컴퓨터 모듈이다. 1년 앞서 공개했던 드라이브 PX1에 비해 성능은 10배 이상 끌어 올린 것으로, 2개의 테그라 모바일 프로세서만 담은 종전에 비해 엔비디아 파스칼 그래픽 아키텍처로 만든 GPU 2개를 더 얹었다.
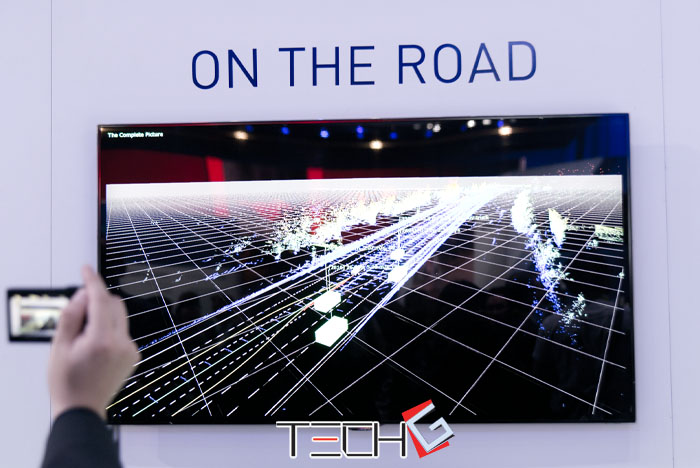
↑자율 주행 자동차에서 들어온 센서 데이터와 인지, 예측, 판단을 위해 엔비디아 드라이브 PX2에서 종합한 이미지
이처럼 강력한 성능은 자동차 스스로 어떻게 도로를 달려야 할 지 결정하는 자율 주행 인공 지능을 위한 것이다. 많은 컴퓨터가 그런 것처럼 충분히 학습된 인공 지능을 심기 전까지는 드라이브 PX2도 깡통에 불과하지만, 인공 지능이 자율 주행에서 마주칠 수많은 상황을 빠르게 분석하고 판단하고 결정할 수 있도록 강력한 처리 성능으로 힘을 보탠다. 그렇다면 자율 주행 인공 지능은 무엇을 처리해야 하기에 이처럼 강력한 성능을 필요로 할까? 드라이브 PX2는 자율 주행의 센서 융합과, 인지 능력, 현지화, 운행 계획 등 4가지 작업을 해낸다.
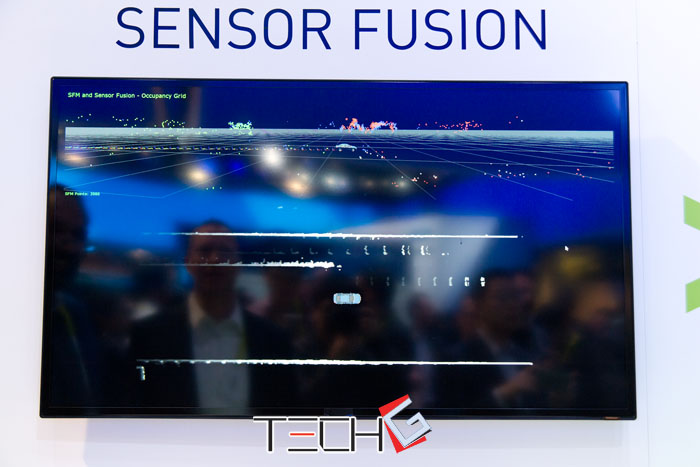
↑각각 다른 성질의 센서에서 들어온 값을 하나로 융합해 만들어내는 이미지 맵
먼저 센서 융합(Sensor Fusion)이다. 자율 주행 자동차는 다채로운 센서로 외부 정보를 모은다. 단순히 도로 정보만이 아니라 사람의 눈으로 보이는 모든 것을 데이터화 하려는 것이다. 카메라는 물론이고 전파나 레이저로 주변 정보를 수집하는 레이더(Radar)와 라이다(Lidar) 등 여러 센서를 자동차 곳곳에 심어 둔다. 이처럼 각각 다른 유형의 센서에서 드라이브 PX2로 실시간 들어오는 데이터는 개별적으로 처리하고 끝내는 것이 아니라 이를 종합해 자율 주행 인공 지능이 이해할 수 있는 하나의 이미지 지도로 만든다. 이때 센서의 수와 유형에 따라 다르나 기가바이트(GB) 이르는 데이터를 처리해야 하므로 강력한 처리 성능이 뒷받침 되어야 한다.
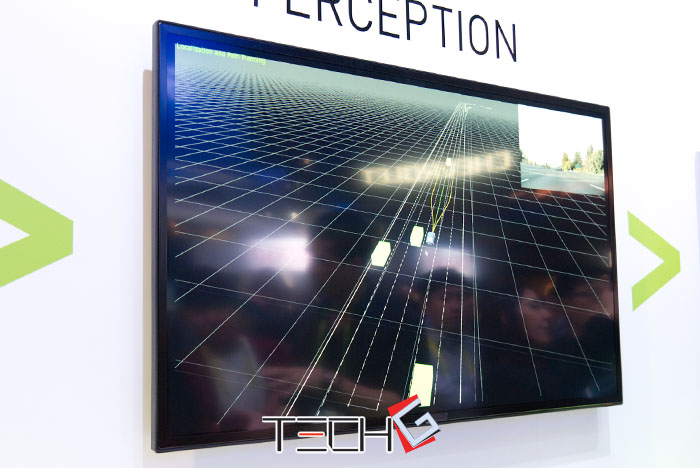
↑자율 주행 차량의 인공 지능은 주변 상황의 상황과 사물을 인지할 수 있지만 이를 위해 많은 처리 능력을 소모한다.
그 다음이 인지 능력(Perception)이다. 이렇게 수집된 데이터들이 무엇인지 이해하는 것이다. 고속도로를 달리는 수많은 차와 일반 도로를 함께 달리는 자전거, 좁은 도로를 걸어가는 사람을 알아채는 재주, 수많은 신호등, 안개 끼고 눈 내리는 날씨를 이해하기 위해 꾸준한 학습으로 완성된 알고리즘을 반복적으로 처리하는 작업을 한다.

↑자율 주행 차량이 도입되는 나라나 도시마다 다른 환경에 대한 적응력도 높여야 한다
현지화(Localization)는 자율 주행차가 다니는 곳의 지역적 특성을 이해하는 것이다. 한국과 미국, 일본과 독일만 비교해도 우리는 전혀 다른 도로를 달린다. 길은 물론 각종 도로 표지도 다를 뿐만 아니라 주행 차선이 다르고, 자동차의 종류도 다르다. 앰뷸런스, 소방차, 경찰차 등 긴급 출동 차량과 수많은 통학 버스의 모양과 종류도 각각이다. 이렇게 다른 현지 정보를 가려내는 것도 자율 주행에서 중요한 일이다.

↑자율 주행 자동차는 가야 할 길을 미리 정해 놓고 달리는 것이 아니라 사람처럼 매 순간 최적의 노선을 설정해서 달린다
마지막으로 주행 계획(Path Planning)이다. 자동차를 어떻게 달려야 할지 계획을 세우는 일이니 지금 내비게이션에서 목적지를 설정한 뒤 보여주는 길 안내와 비슷할 지도 모른다. 하지만 어떤 길로 안전하게 달릴 지, 느리게 가는 앞차를 언제 어떤 차선으로 추월할지 스스로 계획을 세우는 것은 다르다. 그저 내비게이션에서 정한 길을 따라 가는 게 아니라 1~20ms라는 아주 짧은 순간 인공 지능의 판단으로 최적의 주행 계획에 따라 차를 통제한다.
↑엔비디아 부스의 데모용 자율 주행 차량. 비오는 날에도 사람이나 상황을 분간할 수 있다.
자율 주행을 위해 충족해야 할 4가지 작업은 다른 장치를 이용해 처리할 수도 있다. 하지만 엔비디아 드라이브 PX2 한 대만으로 모든 것을 동시에 해 내는 능력을 가졌다. 단순히 뛰어난 성능의 효율적인 컴퓨터를 내놓은 게 아니라 외부 연결에 의존하지 않고 작동하는 자율 주행용 인공 지능의 올바른 판단을 위해 알맞은 성능의 컴퓨터를 만든 것이다. 그런데 다른 컴퓨팅 시스템 없이 드라이브 PX2만 넣어도 자율 주행차를 완성할 수 있을까? 엔비디아는 논리적으로는 그렇고, 올해 안에 그 결과를 볼 수 있을 것이라고 답했다. 물론 드라이브 PX2만 넣으면 깡통에 불과하다. 중요한 것은 역시 인공 지능의 수준. 자율 주행을 위한 인공 지능은 돌발 상황을 비롯해 더 배워야 할 것이 많이 남아 있는 상태지만, 드라이브 PX2 같은 강력한 하드웨어가 인공 지능의 지적 수준을 충족하는 기회를 주는 게 아닐까?
직접 보고 듣고 써보고 즐겼던 경험을 이야기하겠습니다.
chitsol@techg.kr